CoPilot Flugsteuerung
Flugsteuerung mit integriertem Bordcomputer für UAS der nächsten Generation – 100% Made by Multirotor und sofort verfügbar
CoPilot kombiniert einen leistungsstarken Flugcontroller mit einem vollständig integrierten Bordcomputer und bietet so maximale Rechenleistung, Zuverlässigkeit und Systemflexibilität für eine neue Klasse der UAV-Avionik. Vollständig in Deutschland entwickelt und hergestellt.
Heterogene Architektur
für Zuverlässigkeit und Autonomie Verteilung des Flight stacks auf Echtzeit- und Anwendungsprozessoren
Flexibilität und Erweiterbarkeit
Onboard-Unterstützung für hochwertige Sensoren wie Kameras und Ethernet-Peripheriegeräte
Integrierte KI und Bildverarbeitung
Onboard-NPU für KI/ML-Beschleunigung mit 2.3 TOPS


CoPilot Flight controller
Preis auf Anfrage zzgl. MwSt.
Sofort verfügbar.
Hochleistungsfähige autonome Computerplattform mit vollständiger PX4-Unterstützung
- Vollständig PX4-kompatibel mit standardisierten Anschlüssen und erweiterter Schnittstellenunterstützung
- Integrierter Companion computer ermöglicht integrierte KI, Computer Vision, Zielverfolgung und Echtzeitverarbeitung
- Hochleistungs-MCU + Rechenarchitektur für fortschrittliche Autonomie und anspruchsvolle Workloads
100% Made by Multirotor
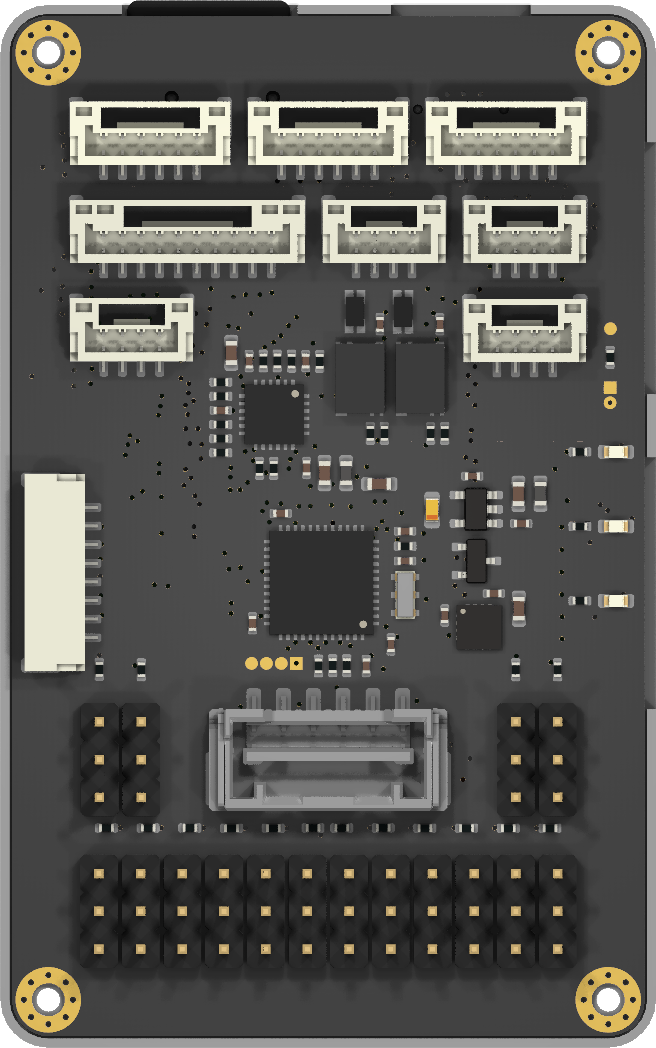
- IMUs und Sensorsuite für maximale Präzision und Ausfallsicherheit
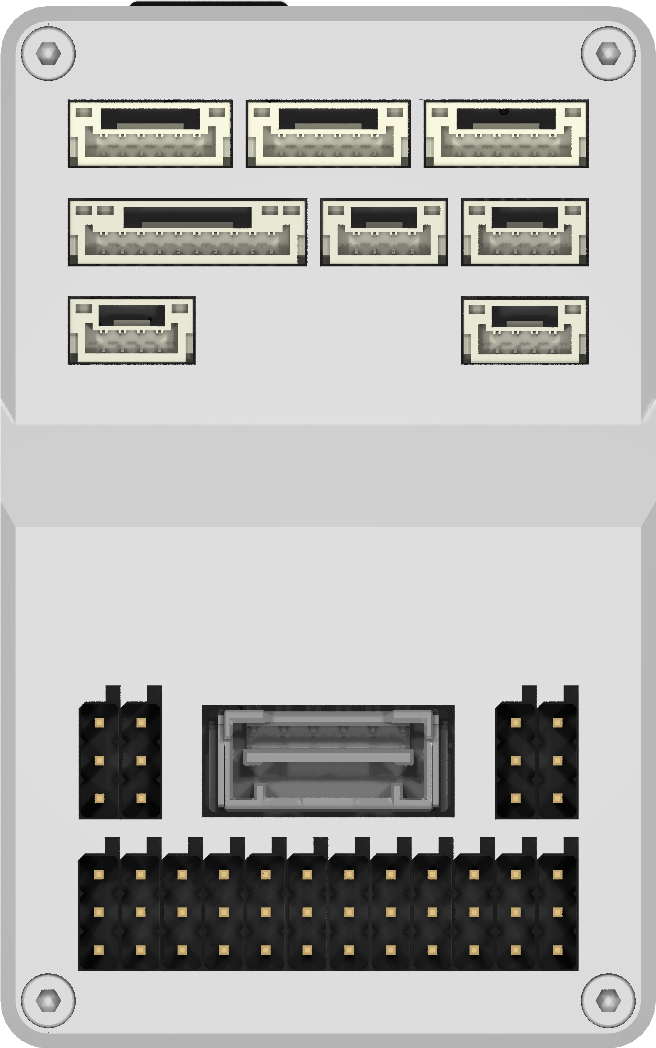
- Anschlüsse in Industriequalität mit robusten Stiftleisten und Servo-Schnittstellen
- Kompatibel mit Multirotor-, Starrflügel- und VTOL-Plattformen
- Thermisch optimierte CNC-gefräste Aluminium-Grundplatte für effiziente Wärmeableitung
- EMI-optimierte Elektronik, in Deutschland entwickelt – keine Abhängigkeit von kritischen Komponenten aus China
- Hohe Produktionskapazität für OEM-Integration und Serienfertigung
- 100% ITAR-frei
Features und Spezifikationen
| Prozessoren | NXP i.MX8M Plus Anwendungsprozessor |
| Dedizierter Cortex-M7-Kern für die Echtzeitaufgaben des Flight Stacks | |
| Quad-Core Cortex-A53-Kerne für Missionscomputer, KI- oder Benutzeranwendungen verfügbar | |
| Integrierte Neural Processing Unit (NPU) für Onboard-KI-Aufgaben wie Objekterkennung, Sensorfusion und Hindernisvermeidung | |
| Integrierte GPU und VPU für erweiterte Videoverarbeitung oder Echtzeit-Codierung/Streaming | |
| Kundenspezifische Anwendungen (A53 Core) |
Echtzeit-Bildverarbeitung und maschinelles Lernen mit integrierter NPU |
| Fortschrittliche Missionslogik und Sensorintegration (z. B. LiDAR, Kameras, Radar) | |
| Rechenintensive Algorithmen wie SLAM und dynamische Routenplanung | |
| Benutzerdefinierte Anwendungen (ROS-Knoten, Python/C++-Tools, benutzerdefinierte GCS-Schnittstellen) | |
| Flexible Software-Partitionierung zwischen flugkritischem Code und Anwendungen auf Benutzerebene | |
| Ideal für High-End-Drohnen, Robotik-Plattformen und autonome Systeme, die Onboard-Intelligenz benötigen | |
| Kompatibilität | Unterstützt PX4-Flugstacks. Kompatibel mit dem gesamten Anwendungsökosystem |
| Sensoren | Leistungsstarke 6-Achsen-IMU IIM-42652 für stabile Lagebestimmung |
| Präziser barometrischer Drucksensor MS5611 für genaue Höhenmessung | |
| Integrierter Magnetsensor MMC5983MA zur Ergänzung externer GNSS/Kompass-Module | |
| Konnektivität | 16× Servoausgänge mit Unterstützung von PWM- und DSHOT-Protokollen |
| 4× UART (inkl. A53 Debug-Schnittstelle), 4× I²C (inkl. dedizierte digitale Power-Schnittstelle), 1× CAN-Bus | |
| 1× UART oder PPM RC-Eingang, 1× UART RC-Telemetrieausgang | |
| 1× USB-OTG- und 1× USB-Host-Schnittstellen zur Unterstützung von Peripheriegeräten und Datenaustausch | |
| 2× MIPI CSI-2 Kamera-Schnittstelle | |
| 1× Micro SD-Karte | |
| 1× Ethernet 100BASE-T | |
| 1× Digitale Power-Schnittstelle für 5V-Versorgung | |
| Abmessungen | 44×70×19 mm |