CoPilot Flight controller
Next-Generation Flight Controller with Integrated Companion Computer – 100% Made by Multirotor and available now
CoPilot defines a new class of high-performance UAV avionics. Engineered and manufactured entirely in Germany, it combines a powerful flight controller with a fully integrated companion computer — providing maximum computing capability, reliability and system flexibility.
Heterogenous architecture
for Reliable Control and Intelligent Autonomy. Distributed Flight stack among Realtime and Application Processors
Flexibility and extensibility
onboard support for high-level Sensors like Cameras and Ethernet Peripherals
Integrated AI and Vision Processing
integrated NPU for AI/ML accelleration with 2.3 TOPS


CoPilot Flight controller
Price on request plus VAT
Available now
High-Performance Autonomous Computing Platform with Full PX4 Integration
- Fully PX4-compatible with standardized connectors and extended interface support
- Integrated companion computer enabling onboard AI, computer vision, target tracking and real-time processing
- High-performance MCU + compute architecture for advanced autonomy and demanding workloads
100% Made by Multirotor
- IMUs and sensor suite for maximum precision and fail-safety
- Industrial-grade connectors, including robust header and servo interfaces
- Compatible with multirotor, fixed-wing and VTOL platforms
- Thermally optimized CNC-milled aluminum baseplate for efficient heat dissipation
- EMI-optimized electronics, German-engineered — no reliance on Chinese critical components
- High-volume production capability for OEM integration and series manufacturing
- 100% ITAR-free
Features and specifications
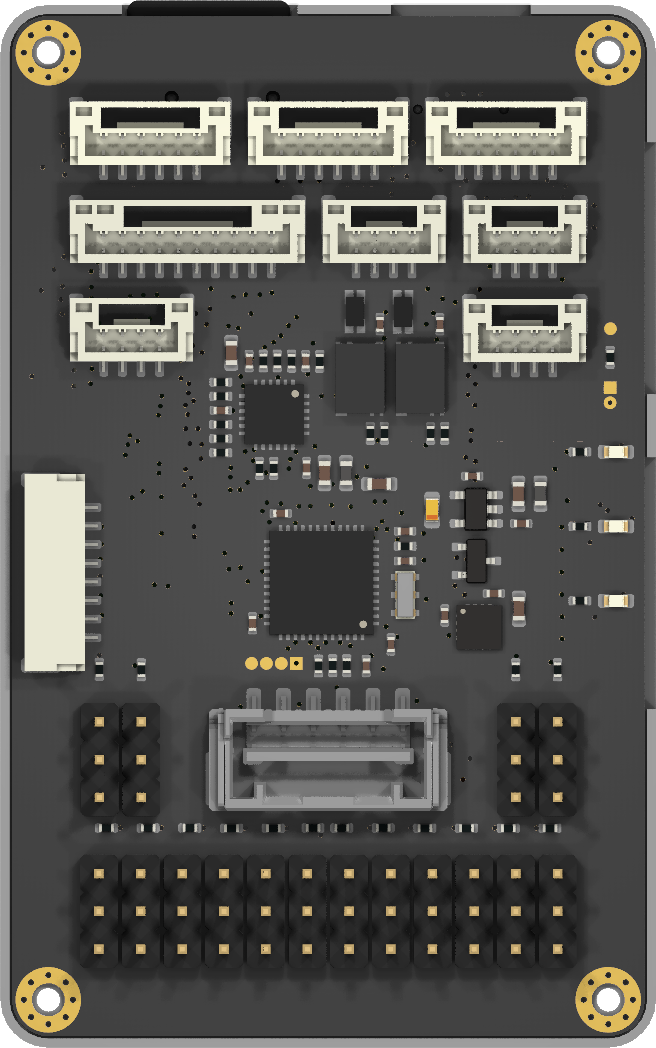
| Processors | NXP i.MX8M Plus application processor |
| Dedicated Cortex-M7 core powering the flight stack’s real-time tasks | |
| Quad-core Cortex-A53 cores available for mission computing, AI or user applications | |
| Integrated Neural Processing Unit (NPU) for onboard AI tasks such as object detection, sensor fusion and obstacle avoidance | |
| Integrated GPU and VPU for advanced video processing or real-time encoding/streaming | |
| User Application Potential (A53 Core) |
Real-time computer vision and machine learning with onboard NPU |
| Advanced mission logic and sensor integration (e.g., LiDAR, cameras, radar) | |
| Edge processing for SLAM and path planning | |
| User-custom applications (ROS nodes, Python/C++ tools, custom GCS interfaces) | |
| Flexible software partitioning between flight-critical code and user-level applications | |
| Ideal for high-end drones, robotics platforms and autonomous systems requiring onboard intelligence | |
| Compatibility | Supports PX4 flight stacks. Compatible with full application ecosystem |
| Sensors | High-performance IIM-42652 6-axis IMU for stable attitude estimation |
| Accurate MS5611 barometric pressure sensor for precise altitude measurement | |
| Built-in magnetic sensor MMC5983MA to complement external GNSS/Compass modules | |
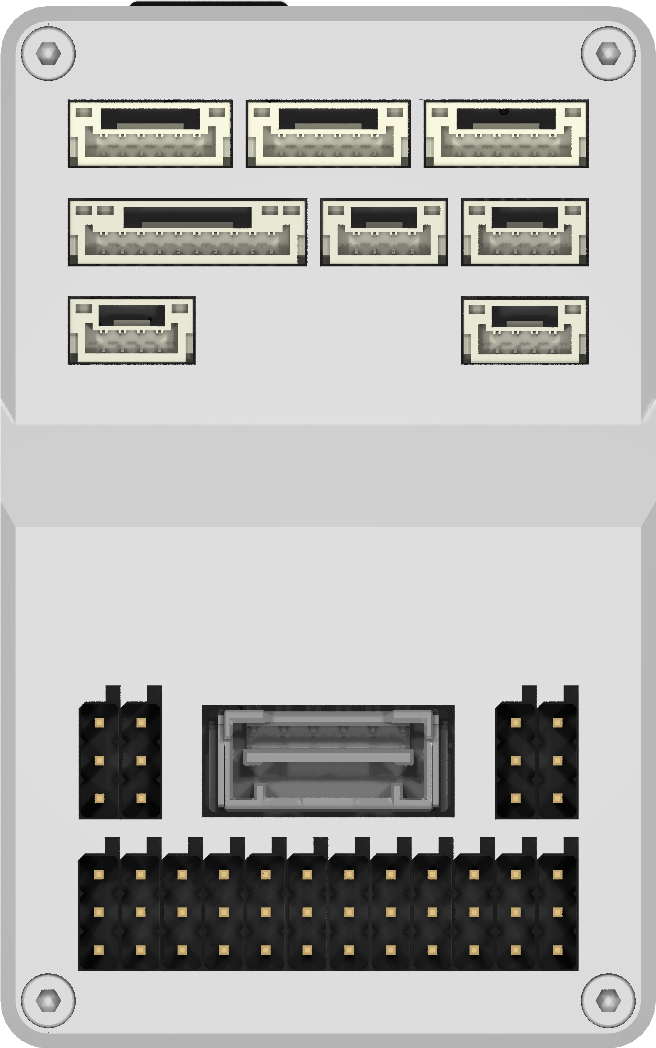
| Connectivity | 16× Servo outputs with support for both PWM and DSHOT protocols |
| 4× UART (incl. A53 Debug interface), 4× I²C (incl. dedicated digital Power interface), 1× CAN bus | |
| 1× UART or PPM RC input, 1× UART RC telemetry output | |
| 1× USB OTG and 1× USB Host interfaces for peripheral and data exchange support | |
| 2× MIPI CSI-2 camera interface | |
| 1× Micro SD card | |
| 1× Ethernet 100BASE-T | |
| 1× Digital Power interface for 5V Supply | |
| Dimensions | 44×70×19 mm |