Together with ADAC Luftrettung, we developed a fully autonomous logistics drone for the highly efficient transport of blood products. Its foundation was our Cargo Robot platform, which was extended by the project partner to include special features for flight safety and load security.
Departure of the pre-programmed waypoint route with permanent intervention option
The logistics system consists of drone, ground control station, ready-made IT interfaces and process flows
Extremely wind-stable up to wind speeds of 10 m/s
Ultra-compact, foldable carbon design
100% data security through stand-alone concept
Equipped with our genuine triple redundant flight control - Made in Germany
AirSenseAir situation display and UTM at new levels of performance
Collision avoidance in the airspace between manned and unmanned aviation is becoming increasingly important. For drones beyond the visual line of sight, we have therefore developed AirSense, a high-performance system for effective detect and avoid (DAA).
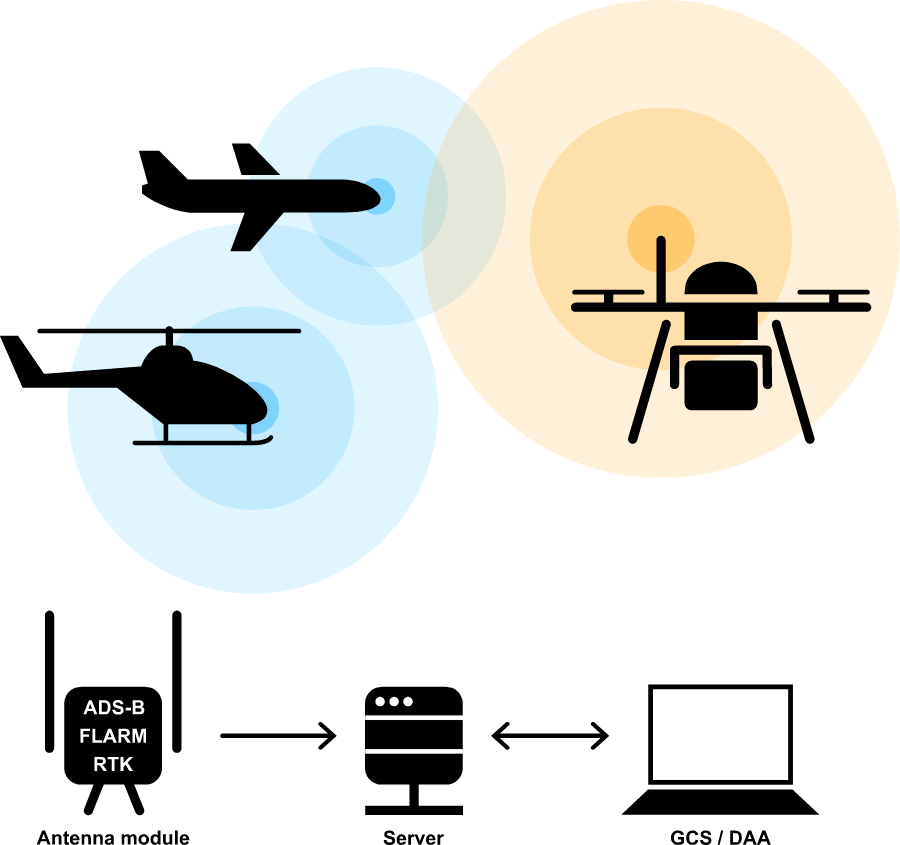
- Detection of ADS-B transponder and FLARM signals of manned aircraft
- Automatic airspace analysis with warning of critical approaches
- Fail-safe processing of airspace data on a high-performance redundant server
- Stand alone system or full integration into the Multirotor Ground Control Station (GCS)
- Optional RTK - base station for the provision of correction data
Everything at a glance
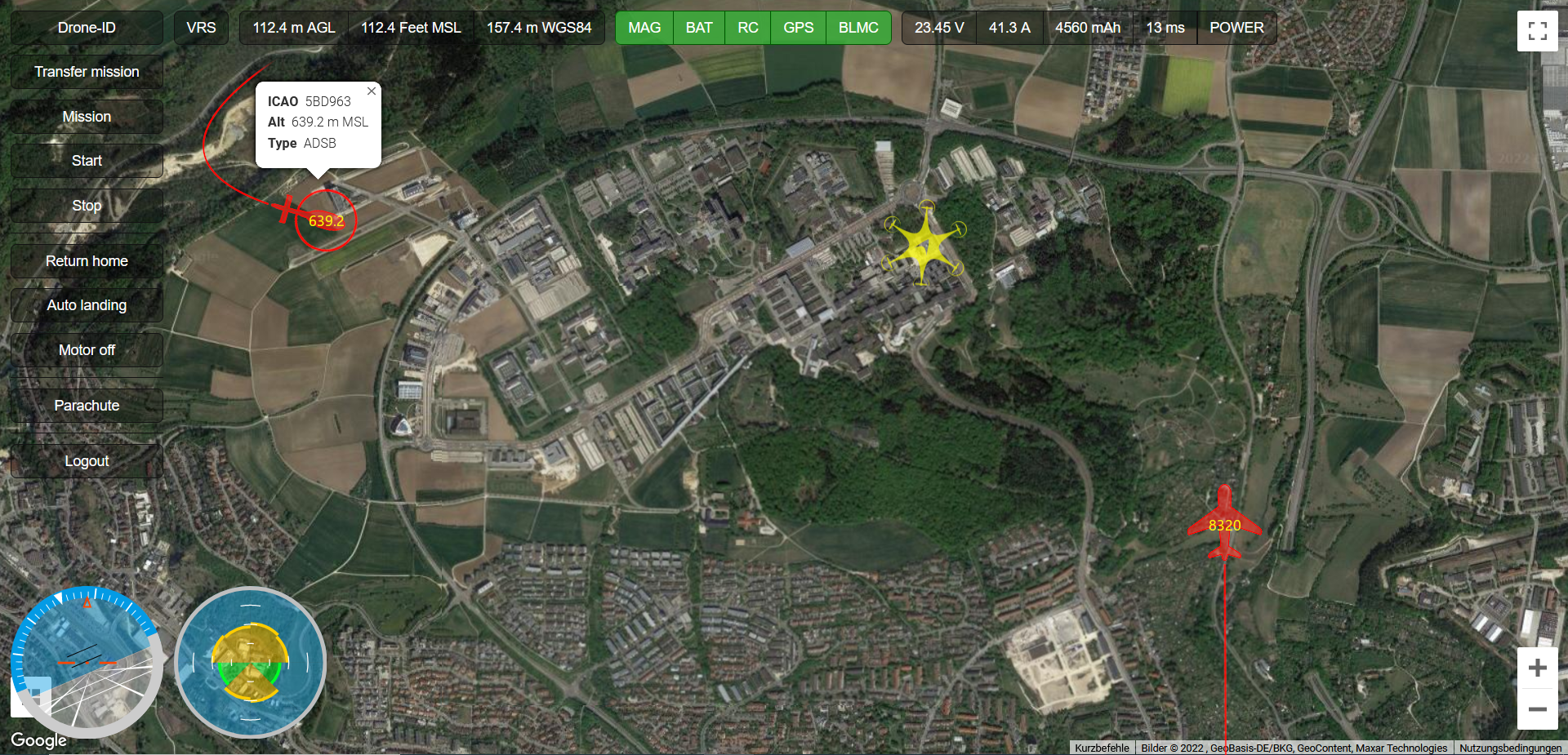
Airspace monitoring in the Ground Control Station with AirSense DAA
DAA for drone logistics
AirSense can be booked stand alone as a DAA solution via direct access (laptop or smart device), but is also fully compatible with the Multirotor Ground Control Station (GCS).
Optional RTK
Its antenna module receives transponder signals and forwards them to the AirSense server via a mobile data connection. However, it can also be used as a base station to provide correction data. This enables the positional accuracy of the multirotor drone to within a few mm, which again opens up new possibilities, especially for fully autonomous landing.
One screen, more overview
Customers operating a multirotor drone with the latest, triple-redundant flight control generation beyond visual line-of-sight (BVLOS) receive the current air situation image of the environment directly in the live image of the GCS. This eliminates the need to operate a separate DAA solution with an additional screen, as is currently necessary when integrating third-party products.
Fast data acquisition
Flight paths of individual aircraft are traced over the last known positions, as well as identifier, flight altitude and type of air traffic (helicopter, aircraft or drone) are displayed.

G5plus Flight Controller100% Made by Multirotor
The G5plus Flight Controller has three redundant flight control cores. These control units continuously calculate the position and position data of the aircraft. By comparing the derived data and a powerful decision logic, faulty results are immediately detected and the corresponding core is deactivated. A fourth auxiliary core handles communication with the world outside and ensures a high-performance data link without impairing flight stabilization.
Each flight control core has its own set of attitude, magnetic and altitude sensors. This redundancy protects not only in case of total failure of one sensor. Deviations in the sensor data, e.g. due to incorrect measurements, are also corrected and taken into account during flight stabilization.
Standardized interfaces facilitate the evaluation of flight data. Via a USB connection the G5plus Flight Controller can be configured and flight data can be retrieved without additional hardware. Furthermore, a multitude of additional interfaces for the connection of peripheral devices are available. Some of these interfaces are redundant, so that e.g. three GNSS receivers can be operated simultaneously.
The G5plus Flight Controller communicates via an AES encrypted WLAN connection. Mission data can thus be transferred easily and safely directly to the aircraft during operation.
A powerful Flight Recorder captures all data occurring during the flight, such as current attitude and position, sent control commands, status of the current mission, etc. at a high rate. This allows, for example, the trajectory of a mission to be easily traced and linked to external events such as the acquisition of single images.
Flight safety equipment
Developed by ADAC Luftrettung

See and be seen - aviation surveillance and visibility for air traffic up to a radius of 4 km

High-precision RTK GNSS receiver incl. LTE connection to the correction service

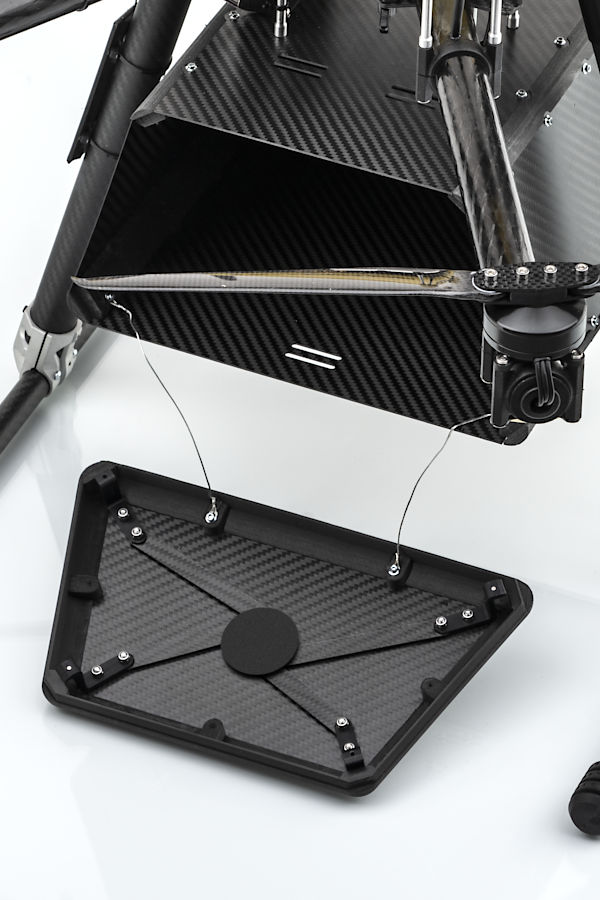
Mechanical ejection without pyrotechnics

Laser distance meter for altitude determination



Load securing equipment
Developed by ADAC Luftrettung



Specifications Drone
| Attitude control 512 times per second | Yes |
| Automatic treble control 24-bit barometric | Yes |
| Radar distance meter | Yes |
| Autonomous flight max. waypoints | up to 4000 |
| Autostart-/Autolanding assistent | Yes |
| Transport container | Yes / Carbon with Central shutter / Cooler box 23x16x12 cm |
| Digital option port (for future applications) | Yes |
| Dimensions | Ø 85 cm, H 49 cm |
| Drive redundancy | Yes |
| Emergency Landing | Yes |
| Flightcontrol Multirotor G5plus redundancy | Yes/Triple |
| Flight data log | 128 Hz |
| GPS flight assistant (Position hold, Coming home) | Yes |
| L1/L2 GPS, GLONASS, Beidou, Galileo | Yes/Triple |
| Max. airspeed | 50 km/h |
| Max. Flight time (ideal) | 22 Min. |
| Max. Range (ideal) | 15 km |
| Max. Take-off weight (ideal) | 7500 g |
| Payload | 1500 g |
| Wind stable till | 10 m/s |
| LTE via all providers with MultiSIM | Yes / Double redundant with 2 Sim cards |
| Flarm in/out | Yes |
| ADSB Signal in | Yes |
| Mode S Signal in | Yes |
| Transmission of the position to DFS | Yes |
| Web based | Yes |
| Multiuser capable | Yes |
| RTK Correction service link | Yes |
| Real-time mission monitoring | Yes |
| Latency | < 0.5 s |
Specifications G5plus Flight control
| Processors | 3 independent control cores, 1 auxiliary core 216MHz ARM cortex M7 |
| GPS | Ublox NMEA compatible interfaces for 3 external gps receivers (redundant) or 1 external receiver (non redundant) |
| Blackbox | SD HC memory card |
| Motor controller | MULTIROTOR proprietary (redundant) or pulse width modulated (non redundant) |
| Interfaces | CAN, UART, SPI, I2C, USB, WLAN |
| User extensions | Current attitude and position data is forwarded via CAN bus to customized sensor equipment. Time stamps of external events are stored on the blackbox. |